Chapter 13: Garbage Collection¶
13.1 背景¶
- 手动内存管理
- 操作方式:使用
malloc和free来执行指针的动态分配和释放。 - 手动管理的问题:极易引发安全问题。
- 操作方式:使用
- 自动内存管理
- 定义:内存的回收是自动进行的。
- 垃圾(Garbage):已分配但不再被使用的存储空间。理想情况下,任何非动态活跃(在未来的计算中不会被使用)的记录都是垃圾。
- 垃圾的判定:判断一个对象是否为垃圾是不可判定 (undecidable) 的,需要依赖一种保守的近似方法:
- 无法从程序变量出发,通过任何指针链到达的堆分配记录就是垃圾。
- 不可达 (not reachable) -> 垃圾 (garbage)。
- 垃圾 (Garbage) -> 可能是可达的 (may be reachable)。
- 可达性(Reachability):一个对象 x 是可达的,当且仅当满足以下条件:
- 一个寄存器包含一个指向 x 的指针,或者
- 另一个可达对象 y 包含一个指向 x 的指针。
- 垃圾回收(Garbage Collection,GC)
- 垃圾回收的定义:在没有显式调用
free的情况下,回收已分配但不再使用的存储空间的过程。 - 执行者:垃圾回收不是由编译器执行的,而是由运行时系统(与编译代码链接的支持程序)执行的。
- 垃圾回收的方法:
- 标记-清除收集法 (Mark-and-Sweep Collection)
- 引用计数法 (Reference Counts)
- 复制收集法 (Copying Collection)。
- 垃圾回收的定义:在没有显式调用
13.2 标记-清除收集法 Mark-and-Sweep Collection¶
-
基本思想
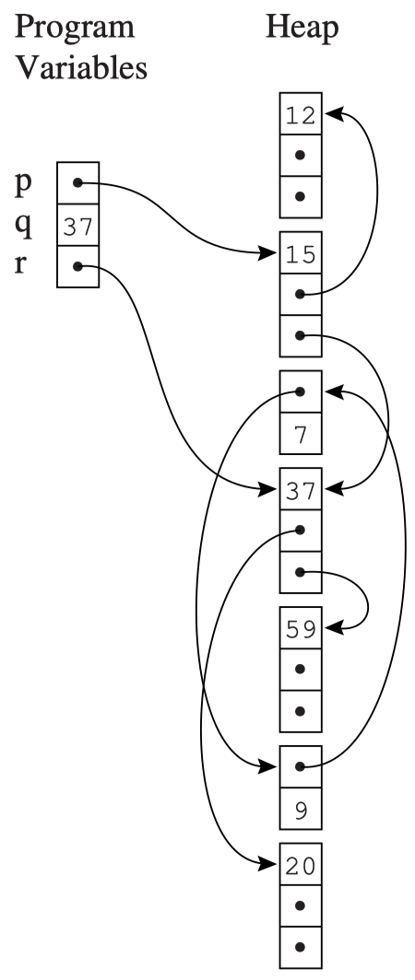
- 数据结构:程序变量和堆分配的记录构成了一个有向图。
- 根节点:程序变量是这个图的根 (roots)。
- 可达性判断:如果存在一条由有向边组成的路径 \(r->...->n\)(其中 r 是某个根),则节点 n 是可达的。
- 标记阶段(Mark):可以使用深度优先搜索 (DFS) 等图搜索算法标记所有可达节点。
- 清除阶段(Sweep):
- 任何未被标记的节点必然是垃圾,应该被回收。
- 具体做法是从堆的第一个地址到最后一个地址扫描整个堆,寻找未标记的节点。
- 垃圾可以被链接到一个称为空闲链表(freelist)的链表中。
- 清除阶段还必须将所有已标记的节点取消标记 (unmark),以便进行下一次垃圾回收。
- 基本算法
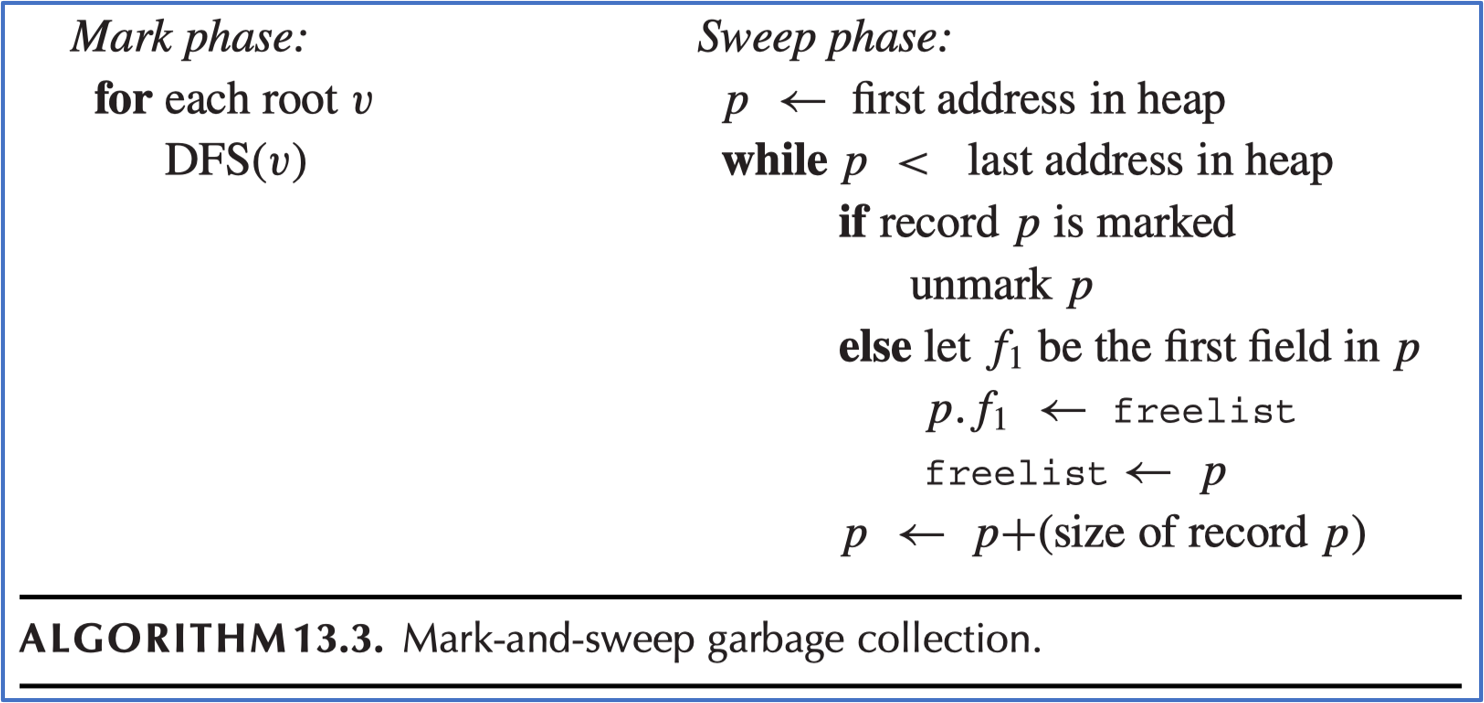
- Mark 阶段:对于每一个根 v,执行
DFS(v)。 - Sweep 阶段:
- 令
p为堆的第一个地址。 - 当
p <堆的最后一个地址时,循环:- 如果记录
p被标记了,则取消标记p。 - 否则,将
p中的第一个字段指向freelist,并将freelist更新为p。 - 将
p更新为p + (记录 p 的大小)。
- 如果记录
- 令
- 后续执行:GC 结束后,编译好的程序恢复执行。当需要堆分配新记录时,它从空闲链表中获取记录;如果空闲链表为空,则通过另一次 GC 进行补充。
- 基本算法的时间空间成本
- 时间成本:
- DFS 搜索:与它所标记的节点数量成正比。
- 清除阶段:与堆的大小 (H) 成正比。
- 空间成本:
- DFS 算法是递归的。在最坏的情况下,活动记录栈的长度会比整个堆还要大。
- 解决方案:对于 DFS 部分,使用显式的栈(explicit stack)代替递归,这样只需要 H 个字 (words),而不是 H 个活动记录。
- 改进算法:使用显式栈(Explicit Stack)
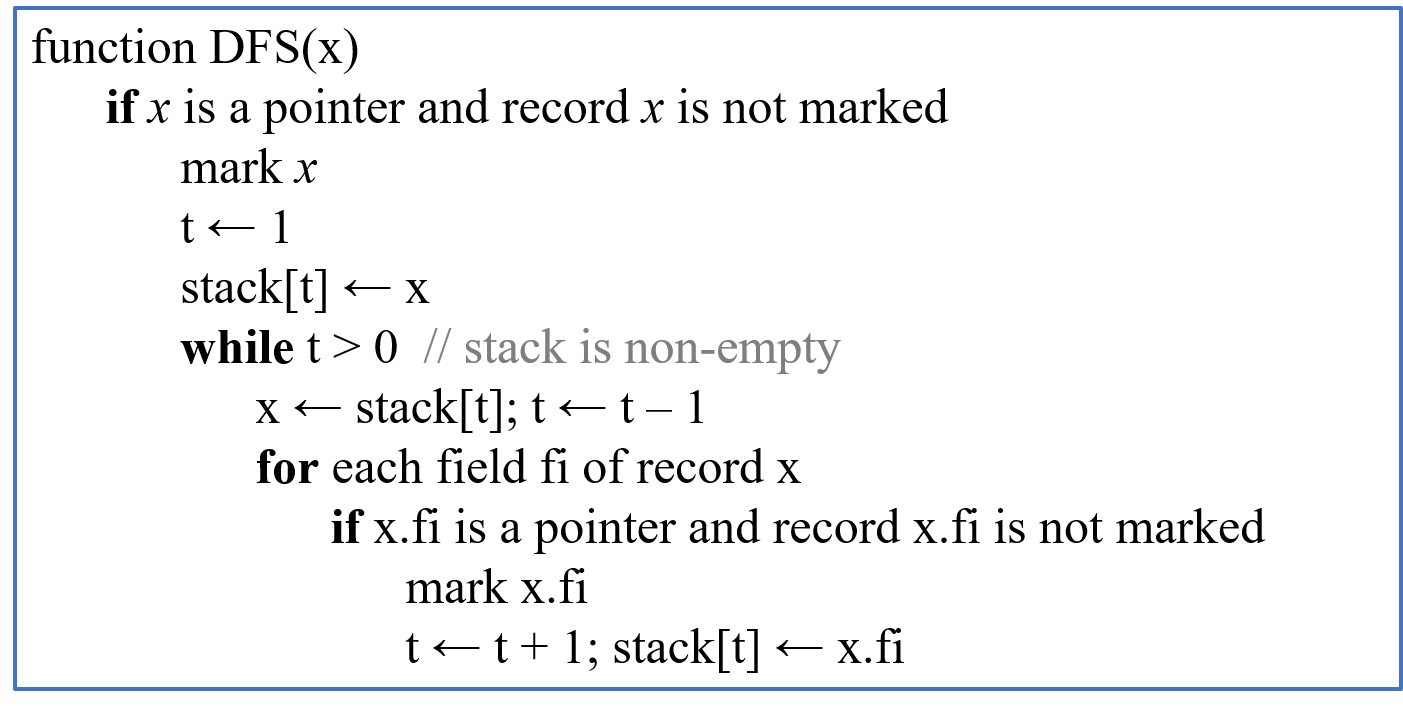
t:表示栈顶的索引号(index)- 当遍历到一个未标记的指针字段时,将其推入显式栈中,并在循环中依次弹出处理。
- 改进算法:指针翻转(Pointer Reversal)
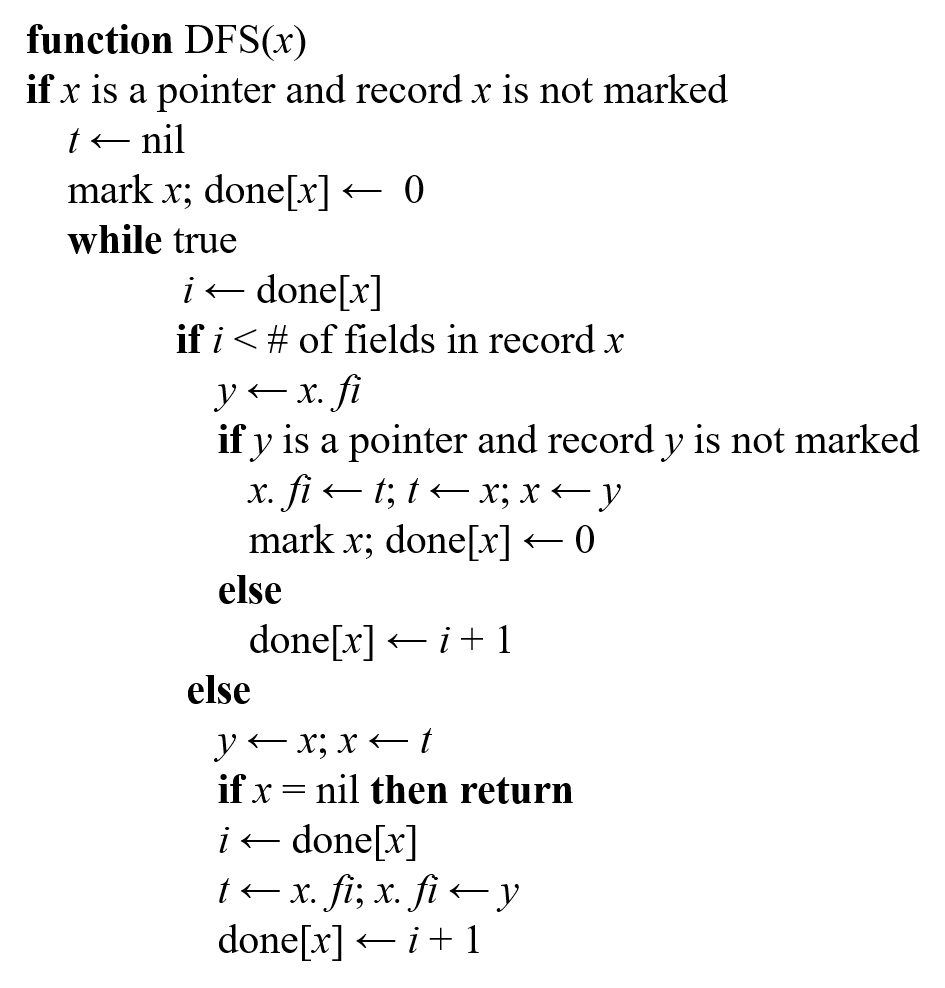
- 目的:为了进一步省略显式栈,从而在 DFS 算法中节省更多空间。
- 原理:
- 将字段
x.fi压入栈后,算法再也不会查看原始位置x.fi。为了不浪费空间,将x.fi指向回 x 的父节点。 - 当
x.fi的处理完成后,可以通过x.fi返回并处理剩余部分,这恰好替代了栈的作用。 - 当退栈时,字段
x.fi会被恢复为其原始值。
- 将字段
- 变量含义:
x:当前正在访问的节点。y:即将要访问的节点。t:当前遍历路径的上一个节点(父节点)。done数组:记录每个记录中已经处理了多少个字段。
-
逐步解析:
-
动作 A:前进向下(类似于进栈)
当我们站在节点
x,准备顺着它的第i个指针字段去访问子节点y时:- 保存现场并反转指针:将父节点
t的地址存入x的第i个字段中。公式: \(x.f_i \leftarrow t\) - 整体向下移动一层:
- 原来的当前节点变成了父节点: \(t \leftarrow x\)
- 原来的子节点变成了当前节点: \(x \leftarrow y\)
此时,你成功往下走了一步,并且
x原本指向y的边,现在反向指向了上面的t。 - 保存现场并反转指针:将父节点
-
动作 B:回溯向上(类似于退栈并恢复现场)
当节点
x的所有子节点都访问完毕(或者它是一个没有指针的叶子节点),我们需要往回走,回到它的父节点t:- 准备上移:此时
x变成了子节点y( \(y \leftarrow x\) ),而父节点t重新成为了当前节点x( \(x \leftarrow t\) )。 - 恢复原始指针:我们回到了父节点
x,需要把它刚才用来记路的指针恢复原状。我们把之前藏起来的更上一层的地址取出来( \(t \leftarrow x.f_i\) ),然后把x的指针重新指向子节点( \(x.f_i \leftarrow y\) )。 - 动作 C:切换相邻分支
如果在回溯回到
x后,发现x还有未访问的字段(比如二叉树访问完了左子树,还要访问右子树):算法会更新done[x]的计数,然后对新的字段重复“动作 A”,继续向下深入。 - 准备上移:此时
-
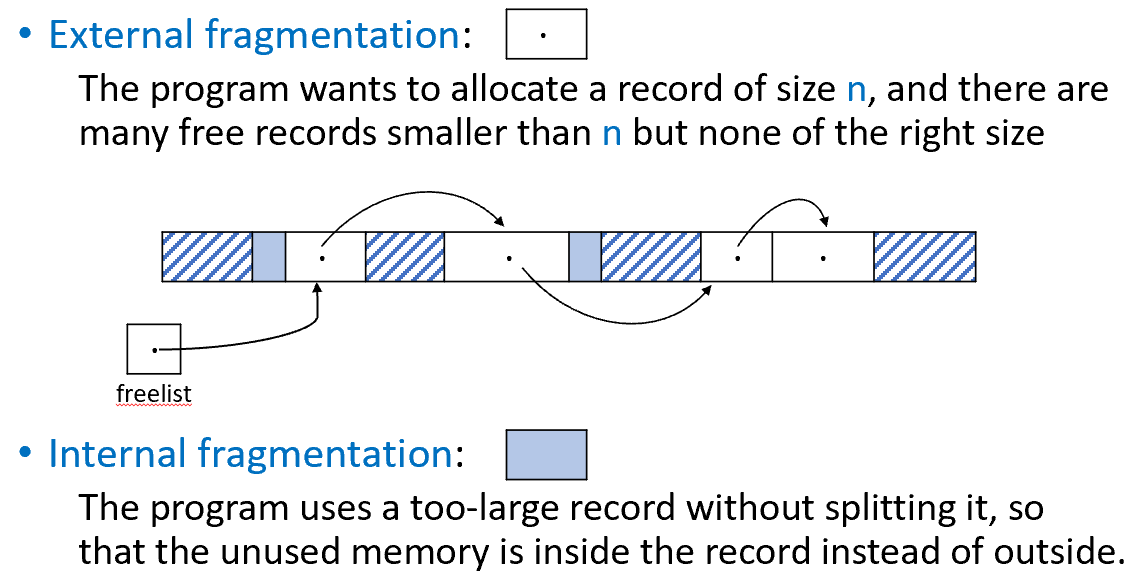
-
外部碎片与内部碎片
13.3 引用计数法 Reference Counts¶
- 基本思想
- 核心思想:直接通过跟踪指向每个记录的指针数量来识别垃圾,而不像标记-清除那样先找出可达对象。
- 引用计数:指向该记录的指针数量。该计数值与每个记录一起存储。
- 如何跟踪:编译器发出额外的指令。当把
p存储到x.fi时,p的引用计数增加,而x.fi之前所指对象的引用计数减少。 - 回收机制:如果某记录
z的计数达到零,则z被放入空闲链表,同时z指向的所有其他记录的引用计数也随之减少。 - 优化(递归递减):在将记录从空闲链表中取出时,而不是放入时,进行引用计数的“递归”递减更好。因为这能将工作分解成更短的片段以保持程序平稳运行(对交互式/实时程序很重要),并且只需在分配器一处完成。
- 引用计数的问题与分析
- 问题一:引用循环 (Reference Cycle):一组对象互相循环引用。引用计数只跟踪引用数量,而不跟踪是否可达。这种循环垃圾无法被回收,这是使用该机制的语言(如 Perl, Firefox 2)中的主要问题。
- 问题二:开销昂贵:增加引用计数非常昂贵。相比于单一的赋值指令,程序必须执行一长串指令以完成计数的递减、归零检查(入列)以及递增操作。
13.4 复制收集法 Copying Collection¶
-
基本思想
- 核心思想:将内存分为两部分,并通过复制进行垃圾回收。
-
过程:
- 在堆的一部分(称为 from-space)中遍历图结构,并在堆的另一部分空闲区域(称为 to-space)中构建同构的副本。
- to-space 中的副本是紧凑的 (compact),占用连续的内存,不存在碎片问题。
- 根节点被更新为指向 to-space 的副本;此后整个 from-space 变得不可达。
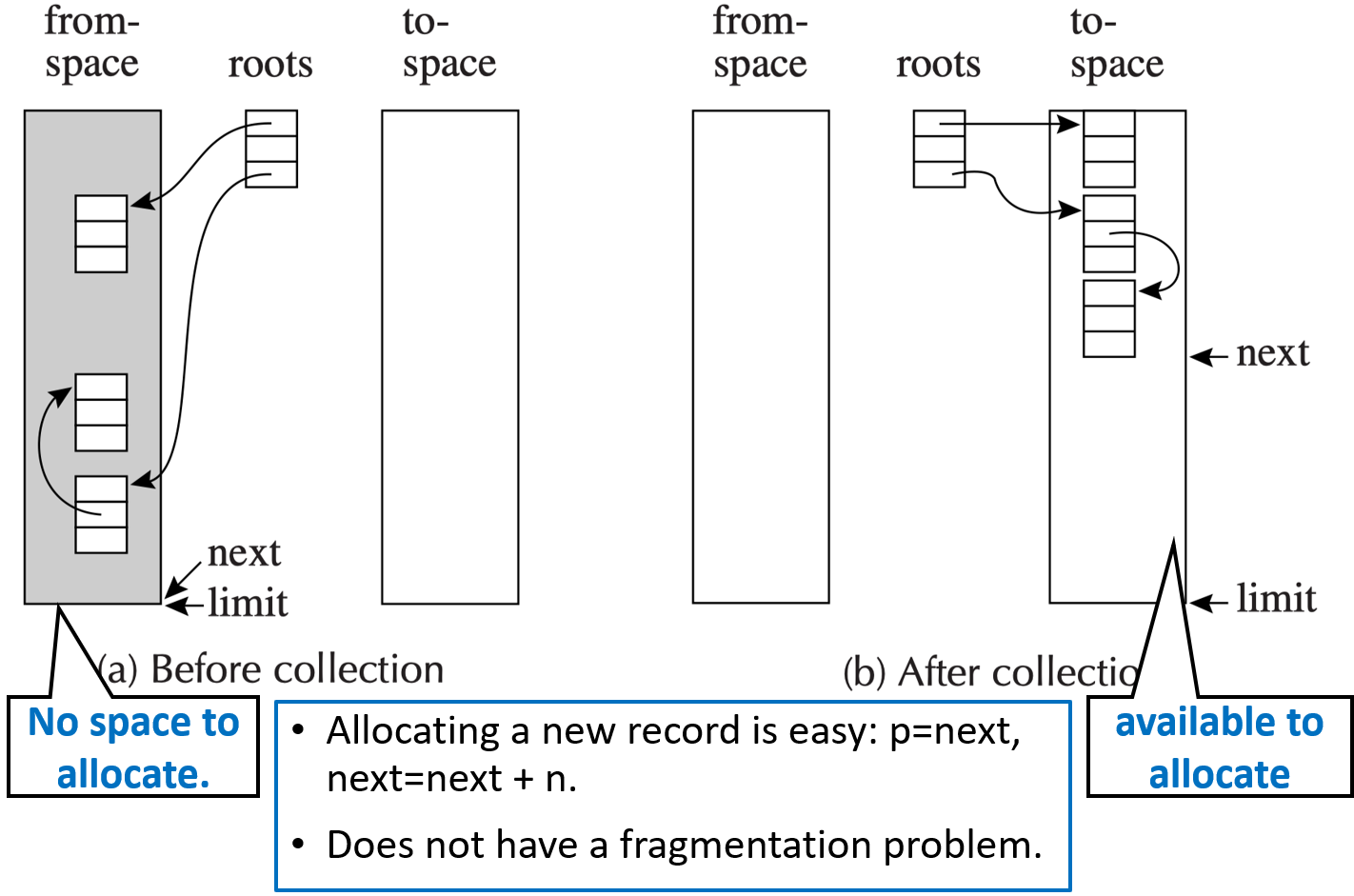
-
基本算法
- 指针
next在初始化时,指向 to-space 的开头位置。 - Forwarding 函数:将指向 from-space 的指针迁移到 to-space。
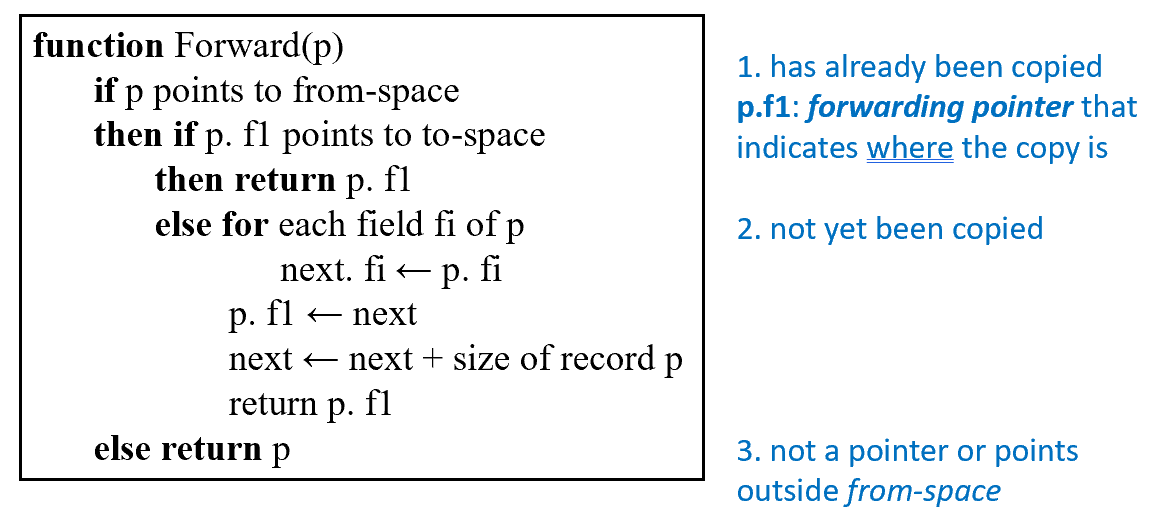
- 指针
-
改进算法:Cheney 算法
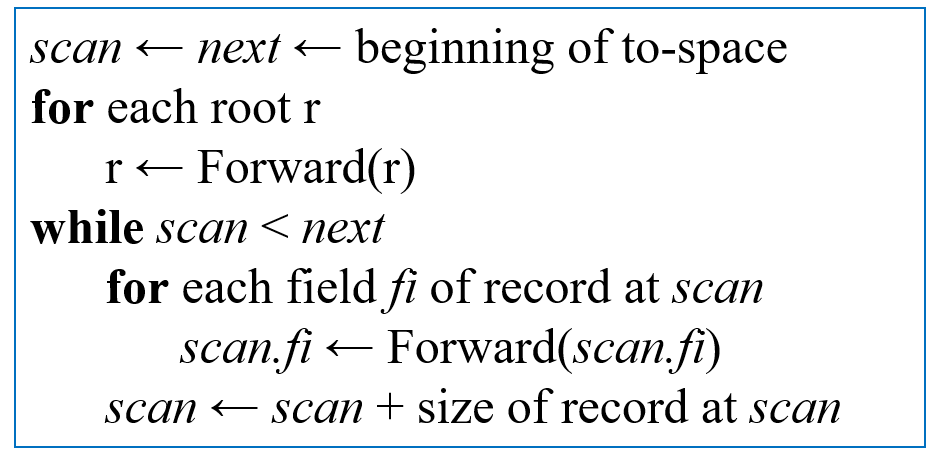
- Cheney 算法是一种使用广度优先搜索遍历可达数据的收集算法。
- 变量含义:
next指针(分配指针):永远指向目标空间(to-space)中下一个可用的空白位置。每当有一个存活对象被确认并复制过来时,就会放在next的位置,然后next向前推移该对象大小的距离。scan指针(扫描指针):指向目标空间中目前正在被检查的对象。当一个对象刚刚被复制过来时,它里面的指针还未被复制,算法需要“扫描”它,把它的子节点也揪出来复制。- 初始化时,两指针都指向 to-space 的开头位置。
- 重点:在
scan和next之间夹着的这部分对象,就是广度优先搜索的队列!它们是“已经被复制过来,但它们的子节点还没被处理”的对象。
- 缺陷:
- 广度优先复制的指针数据结构会导致很差的引用局部性 (poor locality of reference)。相关的对象(如父子节点)在物理内存上可能会相隔很远。
- 深度优先复制可以提供更好的局部性,但需要指针反转,速度慢且不方便。
-
改进算法:BFS-DFS 混合算法
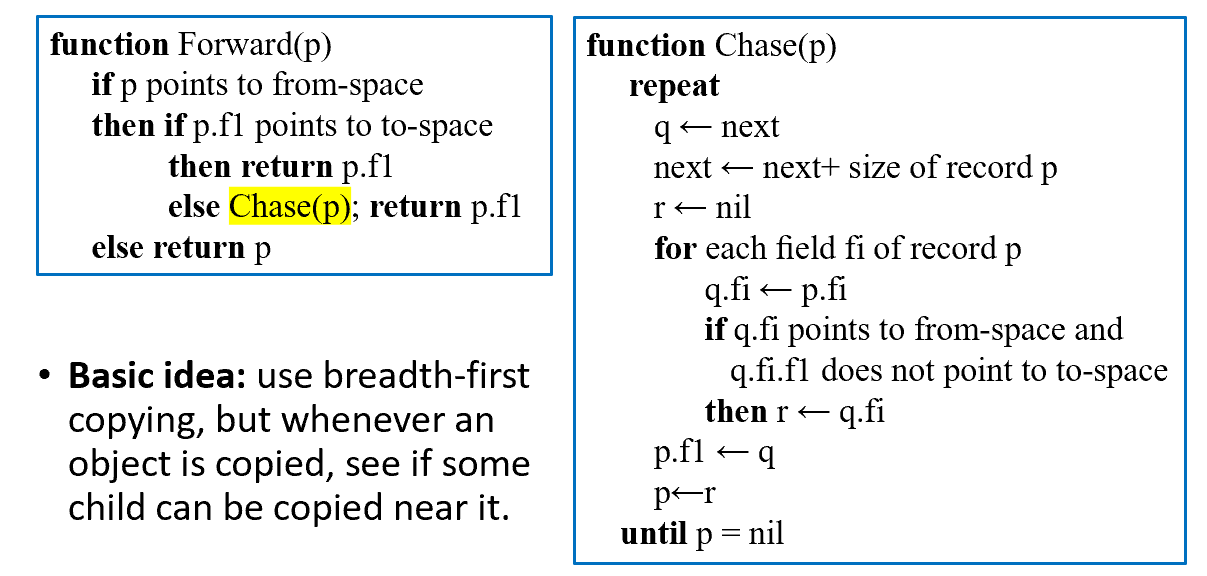
- BFS-DFS 混合算法可以提供可接受的局部性。
- 原理:
- 主体框架使用 BFS,但在复制每个对象时,顺手进行一次局部的 DFS。
- 当一个对象被复制到新空间时,立刻看一眼它有没有哪个子节点还没被复制。如果有,就把这个子节点紧挨着它复制过去。
- 这种做法不需要栈,因为它不追求遍历所有分支,每次只挑一个子节点往下“追(Chase)”,直到这条单传的链条断掉为止。至于那些没被挑中的其他子节点,就留给主循环的 BFS 扫描器(
scan指针)以后再慢慢收拾。
-
逐步解析:
Chase(p)函数循环里发生了什么:- 安家落户:
q <- next和next <- next + size。在目标空间(to-space)给当前对象p划出一块新地盘q,并把分配指针next往前推。 - 设定诱饵:
r <- nil。r是用来记录“下一个要追踪的子节点”的地址的,先清空。 - 搬运家当与寻找猎物:
- 遍历老对象
p的所有字段,一一复制到新对象q中(q.fi <- p.fi)。 - 在复制的同时,顺便检查:这个字段是不是一个指针?它指向的子节点是不是还在旧空间没被搬走?
- 如果是,把这个子节点的地址赋给
r(r <- q.fi)。注意,即使有多个符合条件的子节点,r也只会保留最后一个找到的(或者第一个,取决于实现),它每次只认准一个子节点往下追。
- 遍历老对象
- 留下线索:
p.f1 <- q。在老对象p身上留下一个转发指针,告诉后来者“我已经搬到q了”。 - 接力追踪:
p <- r。把目标更新为刚刚选中的子节点r。 - 循环判断:如果刚才没找到任何符合条件的子节点(
p = nil),说明这条藤摸到底了,循环结束。否则,带着新的p再次进入循环,这就保证了子节点会被紧接着分配在next位置,和父节点q亲密无间地挨在一起!
- 安家落户:
13.5 编译器接口¶
对于使用垃圾回收(GC)机制的编程语言,其编译器不能完全独立工作,它必须通过以下几种方式与垃圾回收器进行深度交互 :
- 生成分配代码:编译器负责生成在堆内存中分配记录(records)的底层机器代码 。
- 定位根节点:在每次触发垃圾回收周期时,编译器必须能够准确向回收器描述“根节点”(roots,即全局变量、栈上的局部变量等存活的起始点)的物理位置 。
- 描述数据布局:编译器需要提供描述数据记录在堆内存中具体布局和结构的信息,以便回收器能正确扫描对象 。
- 生成内存屏障指令:针对某些增量式垃圾回收(incremental collection)算法,编译器还需要在代码中自动插入并生成实现“读屏障”或“写屏障”(read or write barrier)的特殊指令,用于追踪并发过程中的引用变化 。
13.5.1 生成分配代码¶
- 在堆内存中动态创建数据记录通常伴随着较高的性能开销 。
- 为了配合快速分配(Fast Allocation),系统通常采用基于复制的垃圾回收算法(Copying collection) 。
- 在这种算法下,内存的分配空间被设计为一段连续的空闲区域(contiguous free region) 。
- 在此区域内,核心操作依赖两个指针:
next指向下一个可用的空闲内存首地址,而limit则标志着当前连续空闲内存块的边界(末尾位置) 。
13.5.1.1 内存分配标准步骤(未优化)¶
当程序需要分配一个大小为 N 的记录时,最原始的执行逻辑包含以下步骤 :
- 发起对内存分配函数(allocate)的调用 。
- 空间检查:测试条件 next+N<limit 是否成立?如果测试失败,说明当前连续区域容量不足,必须触发并调用垃圾回收器(GC) 。
- 将当前的
next值(即新对象的起始地址)移动并赋值给变量result。 - 清零初始化:将这段新分配的内存空间(从 M[next] 一直延伸到 M[next+N-1])进行清零操作 。
- 推进指针:执行指针更新逻辑 \(next \leftarrow next+N\) 。
- 从分配函数中执行返回指令 。
后续计算操作(不属于分配环节的基本步骤) :
- A. 将
result移动到一个在计算上便于操作的位置(例如寄存器中) 。 - B. 将程序计算得出的有用的数值实际存储到这个记录空间的字段中 。
13.5.1.2 内存分配的四步极限优化¶
为了将分配开销降到最低,编译器会对上述标准步骤进行激进的代码级优化:
- 消除函数开销:步骤 1(调用)和步骤 6(返回)应当被彻底消除 。具体的做法是通过内联展开(inline expanding),将 allocate 函数的内部逻辑直接嵌入到调用者的代码中 。
- 消除冗余赋值:步骤 3(赋值给
result)往往也能被消除掉 。编译器可以将步骤 3 与后续的步骤 A 合并,即直接将当前的next值移动到后续计算所需的“实用位置”,从而省去了中间变量的流转 。 - 消除清零开销:步骤 4(内存区块清零)在许多情况下是多余的,可以为了步骤 B 而被消除 。因为紧接着的步骤 B 会将有用的数值完整写入该记录空间中,这会自动覆盖掉原有的未初始化数据,无需提前浪费指令去清零 。
- 指令共享:步骤 2(边界测试)和步骤 5(指针推进)作为核心控制流,虽然绝对不能被消除,但可以在同一个基本块(basic block)内被多个对象分配所共享 。
总结:如果编译器在寄存器分配阶段,将 next 和 limit 始终驻留在高速寄存器中,那么保留的步骤 2 和步骤 5 总共只需要 3 条机器指令即可完成 。结合上述所有优化,分配一个对象的整体成本(即便将后续最终的垃圾回收摊销进来考虑)可以被极致压缩到大约 4 条机器指令 。
13.5.2 描述数据布局 Describing Data Layouts¶
- 识别需求:垃圾回收器在遍历内存时,必须能够处理程序声明的各种自定义类型的数据记录 。它必须精确得知每个记录由多少个字段组成,以及其中的哪些字段是指向其他对象的指针(用于继续追踪) 。这些元数据来源于编译器在语义分析(semantic analysis)阶段收集的信息 。
- 实现方式:让每个对象内存块的第一个字(word)指向一个特殊的“类型或类描述符记录”(type- or class-descriptor record) 。
- 描述符内容:该描述符由编译器基于静态类型信息自动生成,内部记录了该对象的总占用大小,以及每个包含指针字段的具体偏移位置 。
- 开销对比:
- 在静态类型语言中,这种布局策略会导致每个数据记录在堆中产生一个字(1 word)的额外空间开销 。
- 在面向对象语言中,垃圾回收机制不会造成额外的对象级别开销 。这是因为面向对象语言本身就硬性需要这个指向描述符的指针,以支持“动态方法查找”(dynamic method lookup,例如虚函数表定位),GC 只是复用了这个现成的机制 。
13.5.2.1 指针映射图 Pointer Map¶
- 概念背景:
- 在计算机的底层内存里,指针(内存地址)和普通的数值(比如一个整数
1024)长得一模一样,它们都是一串二进制代码。 - 为进行区分,编译器必须为垃圾回收器生成一份准确的“指针映射图” ,标识出哪些活动记录(局部变量)或临时变量是指针,并指明它们是存储在物理寄存器中,还是存储在函数的活动调用栈帧(activation record)里 。
- 在计算机的底层内存里,指针(内存地址)和普通的数值(比如一个整数
- 生成时机:因为临时变量的活跃性(liveness)在每一条机器指令间都可能发生变化,导致映射图随时不同 。为了简化复杂性,编译器只在可能发生新垃圾回收的代码点上生成并记录映射图 。这些代码点包括显式调用分配函数(alloc)的地方,或者任何常规的函数调用处(因为被调用的函数内部最终也可能触发 alloc) 。
- 索引机制:指针映射图的索引键(key)是返回地址(return addresses) 。因为当垃圾回收开始并扫描堆栈时,它在下一个活动栈帧中首先看到的就是返回地址 。
- 扫描流程:回收器从栈顶开始向下逆向扫描 。通过返回地址索引到栈帧布局的映射图 。根据这些描述,回收器可以在每一帧中识别出所有的指针根节点 。
- 复杂场景处理:被调用者保存寄存器(Callee-save registers)需要格外小心的特殊处理 。例如,如果函数 f 调用了 g,而 g 又调用了 h 。那么在 g 调用 h 的那个点,映射图必须能够精确区分 g 的被调用者保存寄存器中,究竟哪些装载了当前的指针数据,又有哪些只是从函数 f 那里“盲目继承”过来的历史状态 。
13.5.2.2 派生指针的陷阱与解决 Derived Pointers¶
- 陷阱来源:在代码优化后,有时会产生一种并没有指向堆对象正确起始位置的指针。它可能指向对象内存片段的中间,甚至是对象内存的外部边界之前或之后 。
- 案例分析:例如访问数组 a[i-2000],底层可能将其转换为访问 M[a-2000+i] 。其内部计算分为三步:第一步 \(t1 \leftarrow a-2000\),第二步 \(t2 \leftarrow t1+i\),第三步 \(t3 \leftarrow M[t2]\) 。
- 如果该操作处于循环体内,编译器通常会执行外提优化(hoist),将 \(t1 \leftarrow a-2000\) 移出循环体以消除重复计算 。如果循环中伴随着内存分配,且正好在 \(t1\) 存活时触发了垃圾回收,由于 \(t1\) 并未指向对象的起始内存,它会造成回收器行为异常,甚至错误地覆盖不相干的数据 。
- 解决方案:变量 \(t1\) 在这里被称为从基指针 \(a\) 计算得出的派生指针(derived pointer) 。因为它会让收集器产生困惑(confused) ,所以编译器生成的指针映射表必须将每个派生指针明确标记出来,并绑定告知对应的“基指针”是谁 。当回收器将对象基指针从 \(a\) 搬移到新地址 \(a'\) 时,它必须利用偏移量同步更新所有的派生指针,使其指向新的计算地址 \(t1+a'-a\) 。这就要求编译器在存活分析时保证:只要派生指针 \(t1\) 还是活跃的,其基指针 \(a\) 也就必须被认为是活跃的 。
- 生命周期延长保障:任何一个派生指针都会隐式地、强制性地将其所依赖的基指针的存活期(live)一直维系延长 。